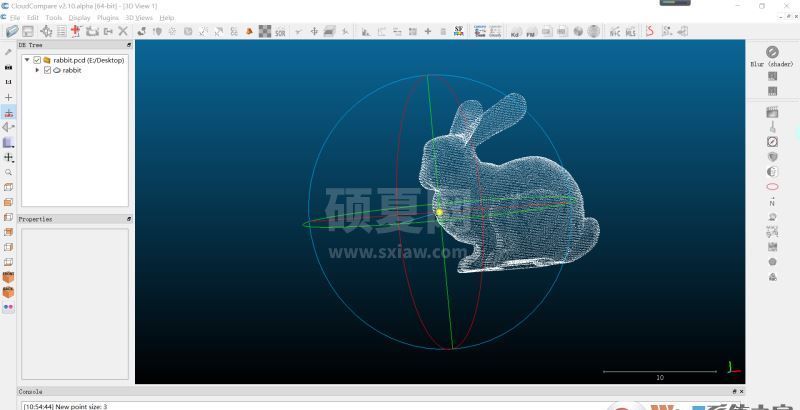
CloudCompare(三维点云处理软件)
- 软件大小:41.54M
- 授权方式:免费版
- 软件类型:免费
- 软件语言:简体中文
- 运行环境:.rar
- 来源:网友上传
- 更新日期:2024-08-27
- 软件介绍
- 下载地址
- 大家都在用
- 评论(comment)
CloudCompare是一款专业的倾斜摄影处理软件,由先进的图像处理框架打造,可以方便地使用计算法向量、优化法向量、泊松构网、滤波等功能,让用户设置最大绝对坐标,满足用户的三维图像处理需求。
CloudCompare软件功能
open:打开
save:保存
Global Shift settings:设置最大绝对坐标,最大实体对角线
Primitive Factory:对点云进行原始加工,改变原始点云的形状
3D mouse:对3D鼠标(如3Dconnexion)的支持
Close all:关闭所有打开的实体
Quit:退出
Edit:
Clone:克隆选中的点云
Merge:合并两个或者多个实体。可以合并点云(原始云会被删除);可以合并网格(原始网不会修改,CC会创建一个新的网格结构)
Subsample:采集原始点云的子样本,可以用随机、立体、基于八叉树的方式采集,子样本会保持原始点云的标量、颜色、法线等性质。
Apply Transformation:可以对选中的实体做变换(4*4矩阵、轴线角,欧拉角)
Multiply / Scale:让选中实体的坐标倍增。
Translate / Rotate (Interactive Transformation Tool):可以相对于另外一个实体或者坐标系移动选中的实体
Segment (Interactive Segmentation Tool):通过画2D多边形分隔选中的实体
Crop:分割一个或多个在3D-Box里面的点云。
Edit global shift and scale:进行全局变换和和比例缩放。
Toggle (recursive):用于控制键盘的快捷键。
Delete:删除选中的实体。
Colors > Set Unique:为所选实体设置唯一一个的颜色
Colors > Colorize:为所选实体着色,具体表现为分别用所选颜色乘以当前颜色的RGB而得到新的颜色
Colors > Levels:通过调整颜色的柱形图变色,类似于Photoshop的Levels方法
Colors > Height Ramp:为所选实体设置颜色渐变(线形、梯形、环形)
Colors > Convert to Scalar Field:将当前的 RGB 颜色字段转换为一个或几个标量字段
Colors > Interpolate from another entity:在所选实体中插入另外一个实体的颜色
Colors > Clear:移除所选实体的颜色域
Normals > Compute:计算所选实体的法线
Normals > Invert:反转所选实体的法线
Normals > Orient Normals > With Minimum Spanning Tree:用同样的方法重新定位点云的全部法线(最小生成树)
Normals > Orient Normals > With Fast Marching:用同样的方法重新定位点云的全部法线(快速行进法)
Normals > Convert to > HSV:将云的法线转换到 HSV 颜色字段
Normals > Convert to > Dip and Dip direction SFs:转换点云的法线到两个标量域
Normals > Clear:为选定的实体移除法线
Octree > Compute:强制计算给定实体的八叉树
Octree > Resample:通过代替每个八叉树单元内的所有点来重新取样
Mesh > Delaunay 2.5D (XY plane):计算点云在xy平面上的2.5D三角剖分(Delaunay 2.5D triangulation,德洛内2.5D三角算法)
Mesh > Delaunay 2.5D (best fit plane):计算点云在最佳平面的2.5D三角剖分(Delaunay 2.5D triangulation,德洛内2.5D三角算法)
Mesh > Convert texture/material to RGB:将选定网格的网格材料和纹理信息转换为逐个点的 RGB 字段
Mesh > Sample points:在一个网格中随机取样
Mesh > Smooth (Laplacian):平滑一个网格(Laplacian smoothing,拉普拉斯平滑算法)
Mesh > Subdivide:细分网格,此算法递归细分网格三角形,直到他们的表面细分到用户指定值之下。
Mesh > Measure surface:测量网格的总体表面积和每个三角形的平均表面积,在控制台输出
Mesh > Measure volume:测量闭合网格的体积,在控制台输出
Mesh > Flag vertices:检查网格的基本特性,为每个网格样本做标志:0 = normal,1 = border,2 = non-manifold
Mesh > Scalar field > Smooth:平滑网格顶点相关联的标量场。此方法与高斯滤波(Gaussian Filter)相反。运用qPCV插件后,此方法特别有用
Mesh > Scalar field > Enhance:增强与网格顶点相关联的标量场。运用qPCV插件后,此方法特别有用
Sensors > Edit:修改指定传感器内外在参数
Sensors > Ground Based Lidar > Create:创建’Ground Based Lidar’ (= TLS)传感器实体,附加到所选的点云
Sensors > Ground Based Lidar > Show Depth Buffer:显示选中的Ground Based Lidar的深度
Sensors > Ground Based Lidar > Export Depth Buffer:以ASCII文件的形式导出选中的Ground Based Lidar传感器的深度图
Sensors > Camera Sensor > Create:创建影像传感器
Sensors > Camera Sensor > Project uncertainty:输出影像模块不确定的点云,输出不确定的x、y、z、3D信息
Sensors > Camera Sensor > Compute points visibility (with octree):统计选中影像传感器选中的点云。0=NOT VISIBLE,1=VISIBLE
Sensors > View from sensor:更改当前的 3D 视图影像设置以匹配选定的传感器的设置 (用泡沫视图模式)
Sensors > Compute ranges:计算全部点(对于任何点云)相对于指定传感器的范围
Sensors > Compute scattering angles:计算全部点(对于任何有法线的云)相对于选中传感器分散的角度
Scalar fields > Show histogram:对当前选中的实体显示有效标量域的柱形图
Scalar fields > Compute statistical parameters:计算统计分布(高斯分布、威布尔分布)
Scalar fields > Gradient:计算标量域的梯度
Scalar fields > Gaussian filter:通过应用一个立体高斯滤镜,平滑一个标量域
Scalar fields > Bilateral filter:用双边滤镜平滑一个标量域
Scalar fields > Filter by Value:用标量值筛选选定的云
Scalar fields > Convert to RGB:将有效的标量场转化为RGB颜色域
Scalar fields > Convert to random RGB:将有效的标量场转化为随机的RGB颜色域
Scalar fields > Rename:对选中实体重命名有效的标量域
Scalar fields > Add constant SF:用一个常数添加一个标量域
Scalar fields > Add point indexes as SF:用点索引的方式为所选点云创建一个新的标量域
Scalar fields > Export coordinate(s) to SF(s):导出坐标到标量域
Scalar fields > Set SF as coordinate(s):为选中的点云设置标量域的坐标
Scalar fields > Arithmetic:可以对在同一个点云的两个标量域进行标准运算(+,-,*,/),或者对单个标量域进行函数运算
Scalar fields > Color Scales Manager:色阶管理,可以管理和创建新色域
Scalar fields > Delete:对选中的实体删除有效的标量域
Scalar fields > Delete all (!):对选中的实体删除全部的有效标量域
Tools:
Level:可以选择三个点确定一个平面来操作
Point picking:可以选择一个、两个、三个点来得到各种信息,如点的坐标、RGB、标量值、距离、角度等信息(尤其是两点间的距离)
Point list picking:可以选择多个点创建一个点列表,可以输出为一个文件、一个新点云、一个折线
Clean > Noise filter:类似于qPCL插件的S.O.R.滤镜,但又更多功能
Projection > Unroll:展开圆柱或圆锥体的点云成一个平面
Projection > Rasterize:栅格化点云(转化为2.5D网格),然后可以导出为一个新点云或者一个光栅图像
Projection > Contour plot to mesh:可以把一组折线转化为网格,输出边缘轮廓线
Projection > Export coordinate(s) to SF(s):导出坐标到标量域
Registration > Match bounding-box centers:调整所有选中的实体,让它们的中心在一个地方
Registration > Match scales:匹配所有选中实体的规模
Registration > Align (point pairs picking):在两个实体中挑选至少三个对应的点来对齐两个实体
Registration > Fine registration (ICP):自动精确地融合两个实体。前提是:①两个云大体上相融;②表现为同样的对象或者至少有同样的形状
Distances > Cloud/Cloud dist. (cloud-to-cloud distance):计算两个点云之间的距离
Distances > Cloud/Mesh dist. (cloud-to-mesh distance):计算点云和网格之间的距离
Distances > Closest Point Set:计算两个点云之间最近的点的集合
Statistics > Local Statistical Test:可以以标量域的局部统计为基础进行分割和过滤点云
Statistics > Compute Stat. Params:计算统计分布(高斯分布、威布尔分布)
Segmentation > Label Conn ected Components:设置最小距离,把所选的云分割成更小的部分,每一部分相互连接
Segmentation > Cross Section:用户可以定义一个裁剪框,可调整框的范围和方向,来裁剪点云。可以用来:①在一个或多个维度重复分割过程;②获取多边形的轮廓
Segmentation > Extract Sections:可以在一个点云的顶部画或者导入多边形来提取截面和轮廓
Fit > Plane:匹配点云中的一个平面和输出各种信息,如拟合 RMS、 垂直平面、地质的倾角、倾角方向值等
Fit > Sphere:适配点云中的一个球体
Fit > 2D Polygon:适配点云中的二维多边形
Fit > Quadric:适配点云中的2.5D曲面
Other > Density:估量一个点云的密度
Other > Curvature:估量一个点云的曲率
Other > Roughness:估量一个点云的粗糙程度
Other > Remove duplicate points:通过设置两点之间最小距离来删除重复的点
Display:
Full screen:全屏
Refresh:刷新,强制刷新有效的3D视图的内容(OpenGL图形重绘)
Toggle Centered Perspective:在正交视图和对象中心视图模式中切换
Toggle Viewer Based Perspective:在正交视图和透视图中切换
Lock rotation about vert. axis:锁定围绕Z轴的影像旋转
Enter bubble-view mode:进入泡沫视图模式
Render to File:可以渲染当前的3D视图成一个图像文件(支持多数标准文件格式),还可以缩放以适应更大分辨率的屏幕
Display settings:对各种显示进行设置:颜色和材质、色阶、标签、其他
Camera settings:影像设置
Save viewport as object:保存当前3D视图的可视体的参数(影像位置和方、透视状态)为一个可视实体,这个实体自动地添加DB树的根
Adjust zoom:调整缩放比例
Test Frame Rate:测试帧速率,让有效的3D视图在一个较短时间旋转从而估量平均帧数,结果在控制台显示
Lights > Toggle Sun Light:切换太阳光
Lights > Toggle Custom Light:切换自定义的光
Shaders and Filters > Remove filter:禁用任何活动的着色器或者OpenGL过滤器
Active scalar field > Toggle color scale:为所选活动的实体切换色阶
Active scalar field > Show previous SF:改变当前所选对象的标量域,激活先前的标量域
Active scalar field > Show next SF:改变当前所选对象的标量域,激活下一个的标量域
Console:控制台(显示/隐藏)
Toolbars:工具栏,包括主工具栏、标量域、视图、插件、GL滤镜
Reset all GUI elements:退出前自动存储当前GUI信息(位置和工具栏的可见性等),可以恢复原始配置
Plugins:
Standard plugins:
qHPR (Hidden Point Removal):如果点云是闭合曲面,则可以过滤(删除)掉通过当前3D影像不能看到的云
qPCL (Point Cloud Library Wrapper):有PCL库一些方法的接口,主要包括:①计算法线和曲率②异常点和噪声点的去除③平滑点云(移动最小二乘法)
qPCV (ShadeVis / Ambient Occlusion):计算点云的明亮度,类似于光线来自于对象周围的半球或球体(可以自定义光线距离)
qPoissonRecon (Poisson Surface Reconstruction):Poisson表面重建,用三角网络生成算法构建的简单的表面
qRansacSD (RANSAC Shape Detection):随机抽样一致形状检测,运用自动形状检测算法的简单接口
qSRA (Surface of Revolution Analysis):计算一个点云和一个假定旋转平面之间的距离(旋转平面用2D轮廓定义),距离计算好后,用户可以创建一个偏差的2D图或者圆柱或圆锥的投影
qCANUPO (Point Cloud Classification):可自动对点云进行分类,也可以手动分类
qM3C2 (Robust C2C Distances Computation):用独特的方法计算两个点云之间的有向(稳健)距离
qCork (Boolean Operations on Meshes):可以执行网格中的布尔操作(也称CSG = 构造实体几何),它基于Cork库
qAnimation:动画渲染插件
qFacets:可以从点云中自动提取二维切面,以它们的垂直距离分开
qCSF (Cloth Simulation Filter):基于布模拟滤波算法,能实现地面点与非地面点的分离,去除非地面点
qCompass:简单地实现点云中地质结构的它的轨迹的数字化
qBroom (qVirtualBroom):高效地扫描和清理
qHoughNormals:计算法法线
qGMMREG:对小型实体的非刚性云的匹配
qLAS_FWF:这个插件可以读写标准雷达文件,可以在命令模式下打开LAS 1.3+文件
qPoissonRecon:可以让输入的点云颜色映射到成网格(快速直接地分配到颜色接近输入点颜色的网格顶点)
OpenGL ‘shaders’ plugins:
qEDL (Eye Dome Lighting):实时底纹滤镜,用来在空白的点云或者网格中增强少量特质(除了几何信息外,它不依赖于其他信息)
qSSAO (Screen Space Ambient Occlusion):实时底纹滤镜,与环境相似的遮挡
qBlur:一个简单的模糊处理滤镜,主要用于开发人员的演示
Deprecated
qKinect (Point Cloud Acquisition with a Kinect):可以用Kinect设备获取(有色的)点云
3D Views:
New:创建3D视图
Close:关闭3D视图
Close All:关闭所有3D视图
Tile:共享的所有 3D 视图之间的显示空间
Cascade:用串联的方式重新排列所有 3D 视图
Next:激活顺序创建的下一个3D视图
Previous:激活顺序创建的上一个3D视图
CloudCompare(三维点云处理软件)免责声明:
1、本软件及软件版权属各自产权人所有,
2、只用于个人封装技术研究交流使用,不得用于商业用途,
3、且本网站不承担任何技术及版权问题,请在试用后24小时内删除。
4、如果您对本软件有任何意见和建议,欢迎到反馈,请购买正版软件!
CloudCompare(三维点云处理软件)共0条评论
- v4.34.3正版
- v2.5.21官方版
- v8.2.1官方版
- v3.5.2绿色版
- v2.2.5优化版
-
Nero Burning ROM纯净版

语言:简体中文
大小:153.53MB
更新日期:10-30
-
360画报全新版

语言:简体中文
大小:4.75MB
更新日期:10-30
-
荣耀手机助理专业版

语言:简体中文
大小:53.39MB
更新日期:10-25
-
Pikafish-皮卡鱼开源象棋引擎
语言:简体中文
大小:70.74MB
更新日期:10-15
-
Free STP Viewer汉语版
语言:简体中文
大小:14.18MB
更新日期:10-03
-
AS SSD Benchmark汉语版
语言:简体中文
大小:440KB
更新日期:09-28
-
IBM SPSS Statistics 26.0中文破解版

语言:简体中文
大小:566.3M
更新日期:08-27
-
RAZER SYNAPS升级版

语言:简体中文
大小:7.96MB
更新日期:10-07
-
LedshowTW(图文编辑软件)
语言:简体中文
大小:254.27MB
更新日期:09-29
-
Canva可画专业版

语言:简体中文
大小:149.14MB
更新日期:09-04
-
京东抢购助手

语言:简体中文
大小:66.66M
更新日期:08-27
-
【pads9.5破解版下载】PASD9.5 64位破解版中文完整版
语言:简体中文
大小:142M
更新日期:08-27
-
快牙电脑版

语言:简体中文
大小:15.93MB
更新日期:11-25
-
EV云互动标准版

语言:简体中文
大小:38.68MB
更新日期:11-25
-
中国银行网银助手PC版

语言:简体中文
大小:4.08MB
更新日期:11-09
-
GPower汉语版
语言:简体中文
大小:5.85MB
更新日期:10-29